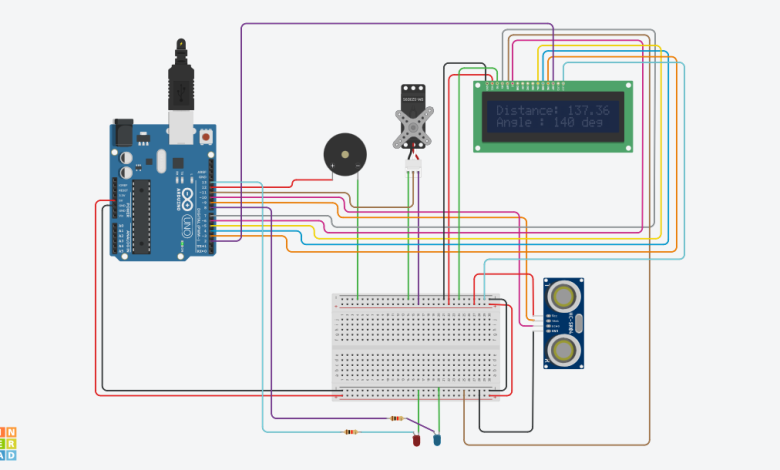
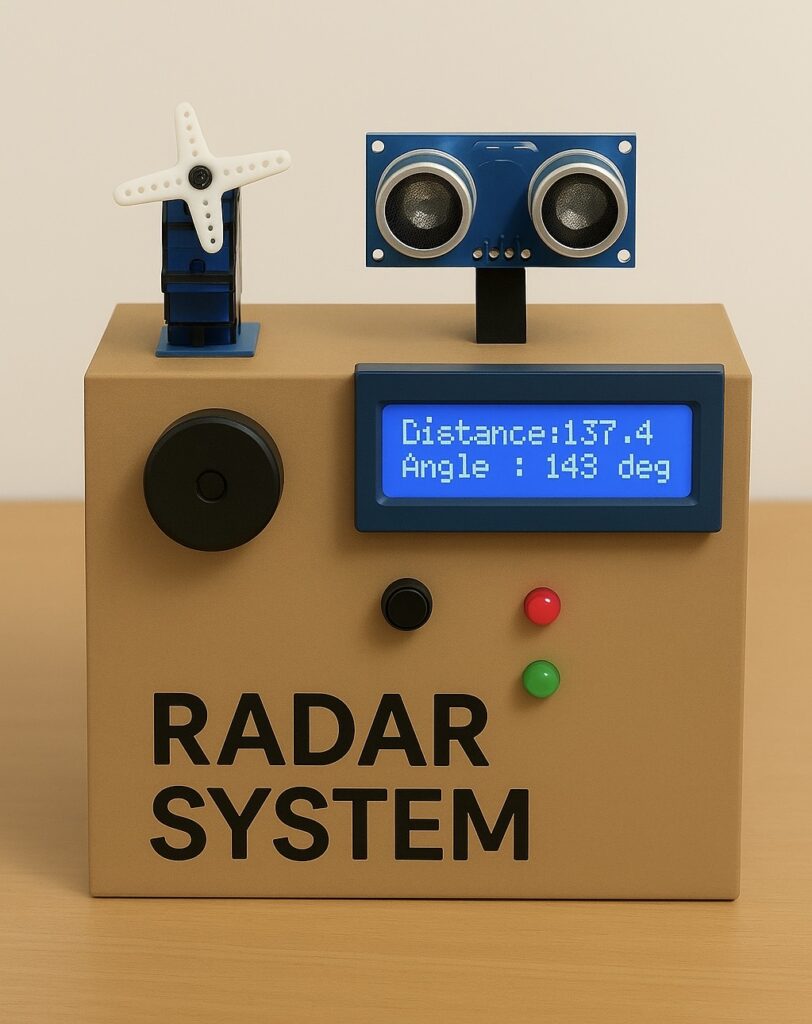
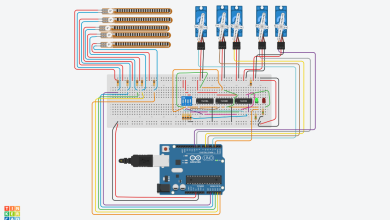
The Arduino Radar System is a versatile project that utilizes a servo motor and an ultrasonic sensor to create a simple radar-like system for distance measurement. This project provides real-time distance information in a specified direction, accompanied by visual and auditory cues.
Component List:
| Name | Quantity | Component |
|---|---|---|
| U1 | 1 | Arduino Uno R3 |
| SERVO2 | 1 | Micro Servo |
| PIEZO1 | 1 | Piezo |
| DIST1 | 1 | Ultrasonic Distance Sensor (4-pin) |
| D1 | 1 | Red LED |
| D2 ‘… | 1 | Blue LED |
| U2 | 1 | LCD 16 x 2 |
| R1 R2 | 2 | 1 kΩ Resistor |
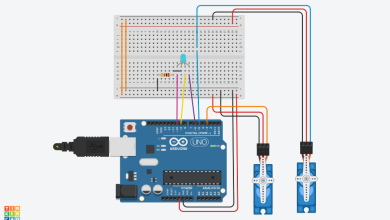
The servo motor rotates the ultrasonic sensor in a sweeping motion, covering a range of 180 degrees. The ultrasonic sensor emits high-frequency sound waves, and by measuring the time it takes for these waves to bounce back after hitting an obstacle, the system calculates the distance. The Arduino processes this information and displays the distance on the LCD. Visual indicators, LEDs, and an audible buzzer provide additional feedback, enhancing the user experience.
Ardunio Code:
#include <Servo.h>
#include <LiquidCrystal.h>
Servo myservo;
LiquidCrystal lcd(7, 6, 5, 4, 3, 2);
int pos = 0;
const int trigPin = 9;
const int echoPin = 10;
const int motor = 11;
const int buzzer = 12;
const int ledPin1 = 13;
const int ledPin2 = 8;
float distanceCm, DistanceSec, duration;
void setup() {
myservo.attach(motor);
lcd.begin(16,2);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
DistanceSec=20;
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) {
myservo.write(pos);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distanceCm = duration * 0.034 / 2;
if (distanceCm <= DistanceSec) {
if (distanceCm <= DistanceSec / 2) {
tone(buzzer, 12);
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, HIGH);
delay(700);
noTone(buzzer);
lcd.setCursor(0, 0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm ");
delay(10);
lcd.setCursor(0, 1);
lcd.print("Angle : ");
lcd.print(pos);
lcd.print(" deg ");
delay(2000);
}
else { digitalWrite(buzzer, HIGH);
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin1, HIGH);
delay(100);
digitalWrite(buzzer, LOW);
lcd.setCursor(0, 0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm ");
delay(10);
lcd.setCursor(0, 1);
lcd.print("Angle : ");
lcd.print(pos);
lcd.print(" deg ");
delay(2000);
}
}
else { digitalWrite(buzzer, LOW);
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, LOW);
}
lcd.setCursor(0, 0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm ");
delay(10);
lcd.setCursor(0, 1);
lcd.print("Angle : ");
lcd.print(pos);
lcd.print(" deg ");
delay(80);
}
for (pos = 180; pos >= 0;
pos -= 1) {
myservo.write(pos);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distanceCm = duration * 0.034 / 2;
if (distanceCm <= DistanceSec) { if (distanceCm <= DistanceSec / 2) { tone(buzzer, 12);
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, HIGH);
delay(700);
noTone(buzzer);
lcd.setCursor(0, 0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm ");
delay(10);
lcd.setCursor(0, 1);
lcd.print("Angle : ");
lcd.print(pos);
lcd.print(" deg ");
delay(2000);
}
else { digitalWrite(buzzer, HIGH);
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin1, HIGH);
delay(100);
digitalWrite(buzzer, LOW);
lcd.setCursor(0, 0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm ");
delay(10);
lcd.setCursor(0, 1);
lcd.print("Angle : ");
lcd.print(pos);
lcd.print(" deg ");
delay(2000);
}
}
else { digitalWrite(buzzer, LOW);
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, LOW);
}
lcd.setCursor(0, 0);
lcd.print("Distance: ");
lcd.print(distanceCm);
lcd.print(" cm ");
delay(10);
lcd.setCursor(0, 1);
lcd.print("Angle : ");
lcd.print(pos);
lcd.print(" deg ");
delay(80);
}
}This Arduino Radar System project offers an engaging introduction to distance sensing and servo motor control, making it an educational and interactive electronics endeavor.

Very cool project! Thanks for sharing your work